






珠海水下焊接机器人搭载聚醚型聚氨酯磁吸包胶轮,适配海水长期浸泡工况,耐水解抗海水盐蚀,高摩擦防滑不划伤钢结构船体,强磁吸附稳定爬壁行走,耐磨减震,大幅降低水下检修更换频次,保障海工焊接连续作业稳定运行。
一、为什么选择聚氨酯磁吸车轮
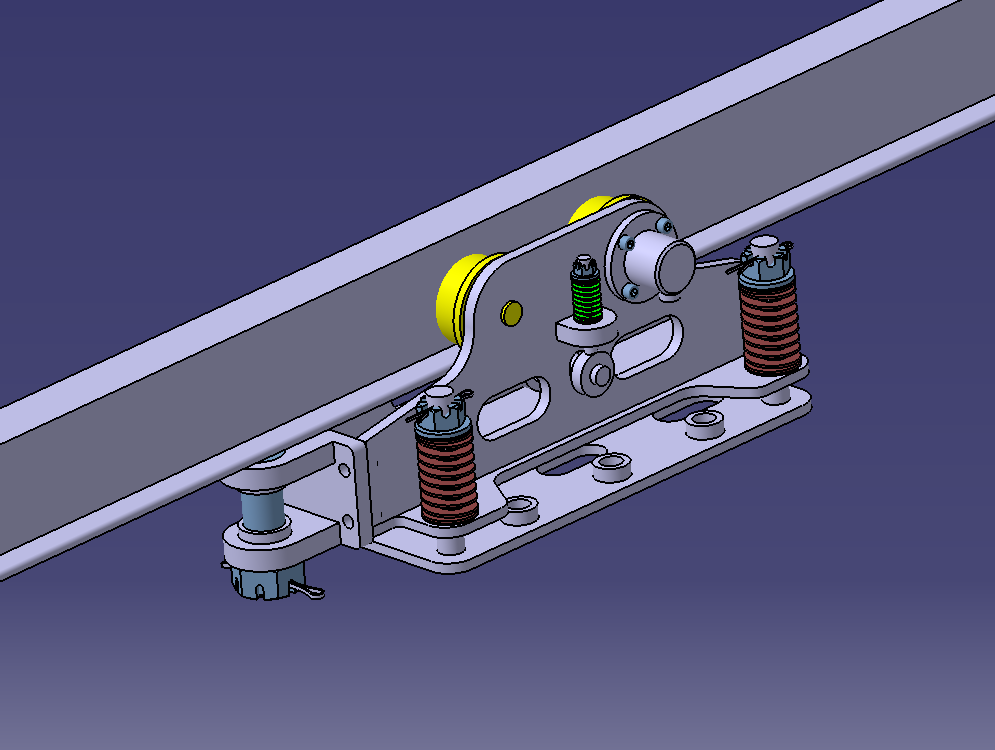
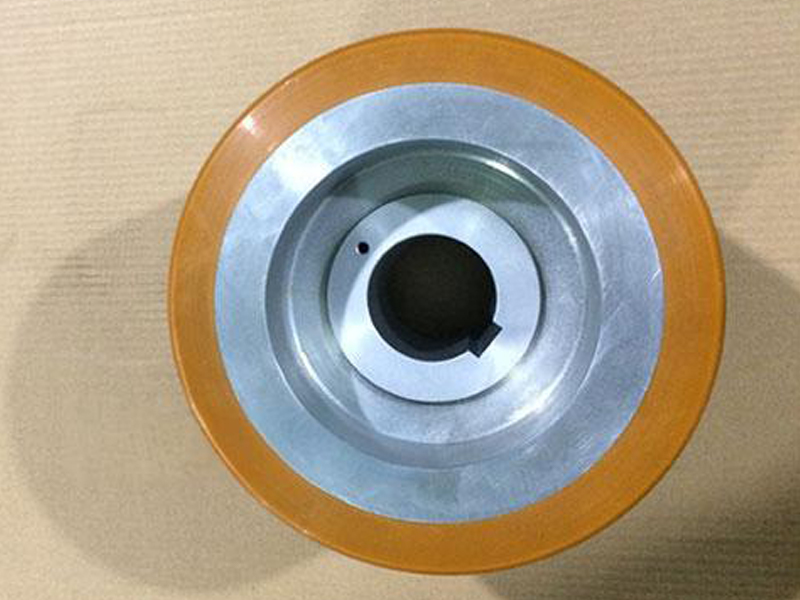
1、磁力吸附:内置的永磁体产生强大磁力,确保机器人在铁磁性材料的壁面(如船体、储罐)上稳定吸附,并能抵抗水下暗流的冲击。
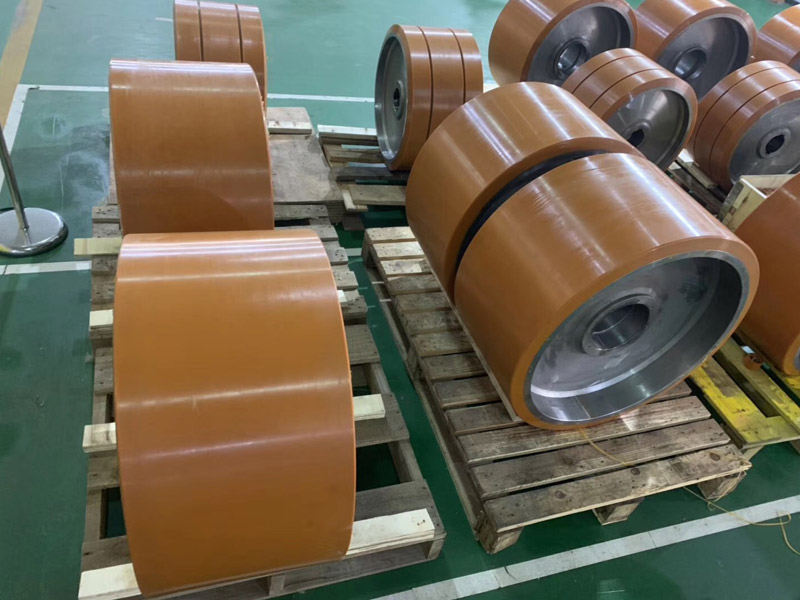
2、聚氨酯包胶:柔软的聚氨酯材料具有出色的弹性和耐磨性,让机器人既能稳定吸附,又能平稳行进。
3、核心优势:
保护表面:防止硬质磁轮直接刮伤昂贵的船体涂层或设备表面。
提升通过性:聚氨酯的弹性可产生微小形变,使车轮能更好地贴合不平整的表面(如焊缝、锈蚀处),增强抓地力。
减震降噪:提供缓冲,吸收行走时的震动,保障焊枪精密作业的稳定性。
耐腐蚀耐磨:聚氨酯极强的耐腐蚀和耐磨特性,使其能胜任严苛的水下工作。
保持磁力:精密的薄层包胶工艺,能将磁力损耗控制在最低限度。

二、聚焦珠海应用案例
1、应用场景:水下管道、船体、桥梁等磁性结构物的原位修复。
2、核心技术亮点:
多环境自适应磁力轮吸附:集成六大关键技术之一,其中就包括了经过优化的磁力吸附轮。
高精度焊接:在水下阻力很大的环境中,焊接精度仍能达到 ±0.05毫米,与陆地上保持一致。
智能视觉系统:集成微型视觉监测系统,可实时监控水下焊接环境和电弧情况。
复合排水技术:同时支持“干法”、“局部干法”及复合方案,创造微区域局部干燥环境,确保焊接质量。
三、技术优势与潜在挑战
1、技术优势:聚氨酯包胶层通过缓冲震动提升焊接稳定性,保护行走表面减少损伤,并提供强摩擦力以避免在湿滑或倾斜表面打滑。
2、潜在挑战:
长期海水腐蚀:聚氨酯虽耐腐蚀,但长期高盐、高压海水浸泡仍可能导致性能下降。
磨损与更换:在粗糙表面长期行走后,包胶层会逐渐磨损,吸附和行走性能也会随之衰减。
吸附稳定性:包胶厚度与磁性需精密匹配,不当的平衡可能导致吸附力不足或在复杂表面行走不稳。
总结
通过其领先的水下焊接机器人项目,聚氨酯包胶轮技术提供了重要的产业化应用实例。这项技术有效解决了水下爬壁机器人在吸附性与移动性之间的核心矛盾,是其实现高精度作业的基石之一。

